A multiple shooting algorithm is employed in order to identify the periodic orbits corresponding to trimmed flight, and to simultaneously compute their stability through their Floquet multipliers.
We use a multiple-shooting scheme first proposed by~cite{lust2001}, which was a modification of~cite{keller1968}. This algorithm is adapted to our case with the advantage that the limit cycle period is known, since it must be equal to the flapping one.
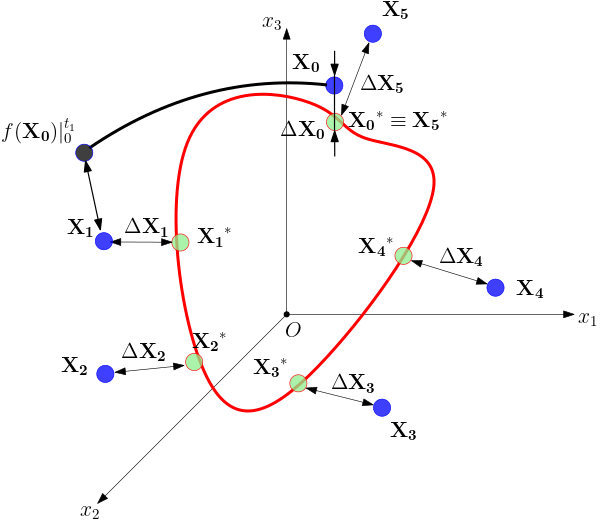
The multiple-shooting method splits the limit cycle into several points computing relatives sub-trajectories.\
Integrating the ODEs system, the point \(\mathbf{x}^*_{i+1}\) is mapped to the point \(\mathbf{x}^*_{i}\) by
By expanding at the first order the right-hand-side of Equation (1), the point \(\mathbf{x}^*_{i+1}\) can be expressed as function of the guessed points only